

«Калибровка» термодатчиков
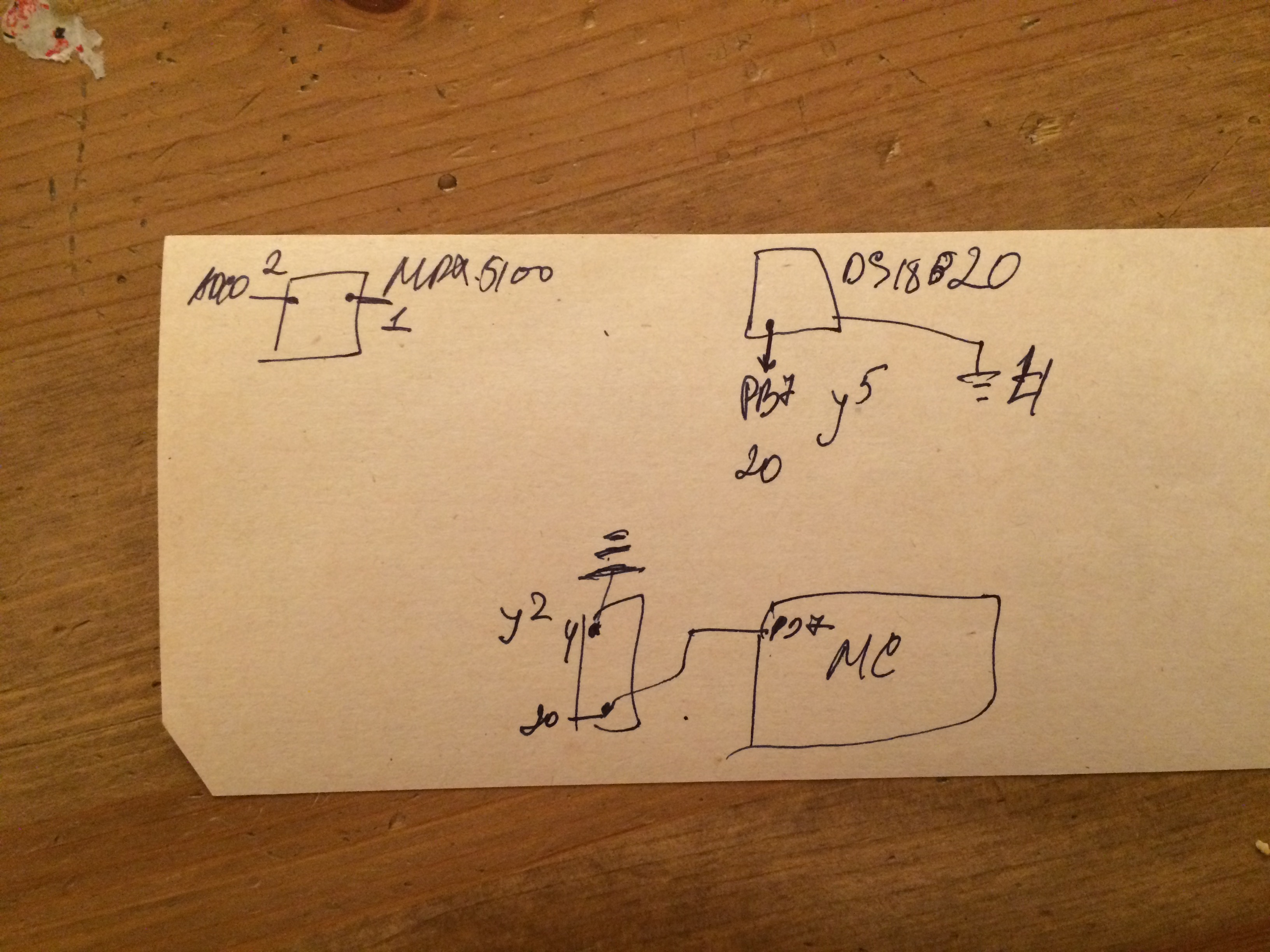
Для основной и дополнительной миссий в нашем спутнике CanSat будет использоваться несколько термодатчиков. А именно:
- DS18b20 — находится внутри спутника, входит в базовый набор и обязательную миссию;
- DS18b20 — будет находится снаружи спутника, входит в дополнительную миссию;
- BMP085 — термодатчик в составе датчика давления, будет находится внутри спутника, входит в дополнительную миссию.
В процессе предварительной работы с датчиками у нас закралось подозрение в точности их настройки, мы решили провести их калибровку.
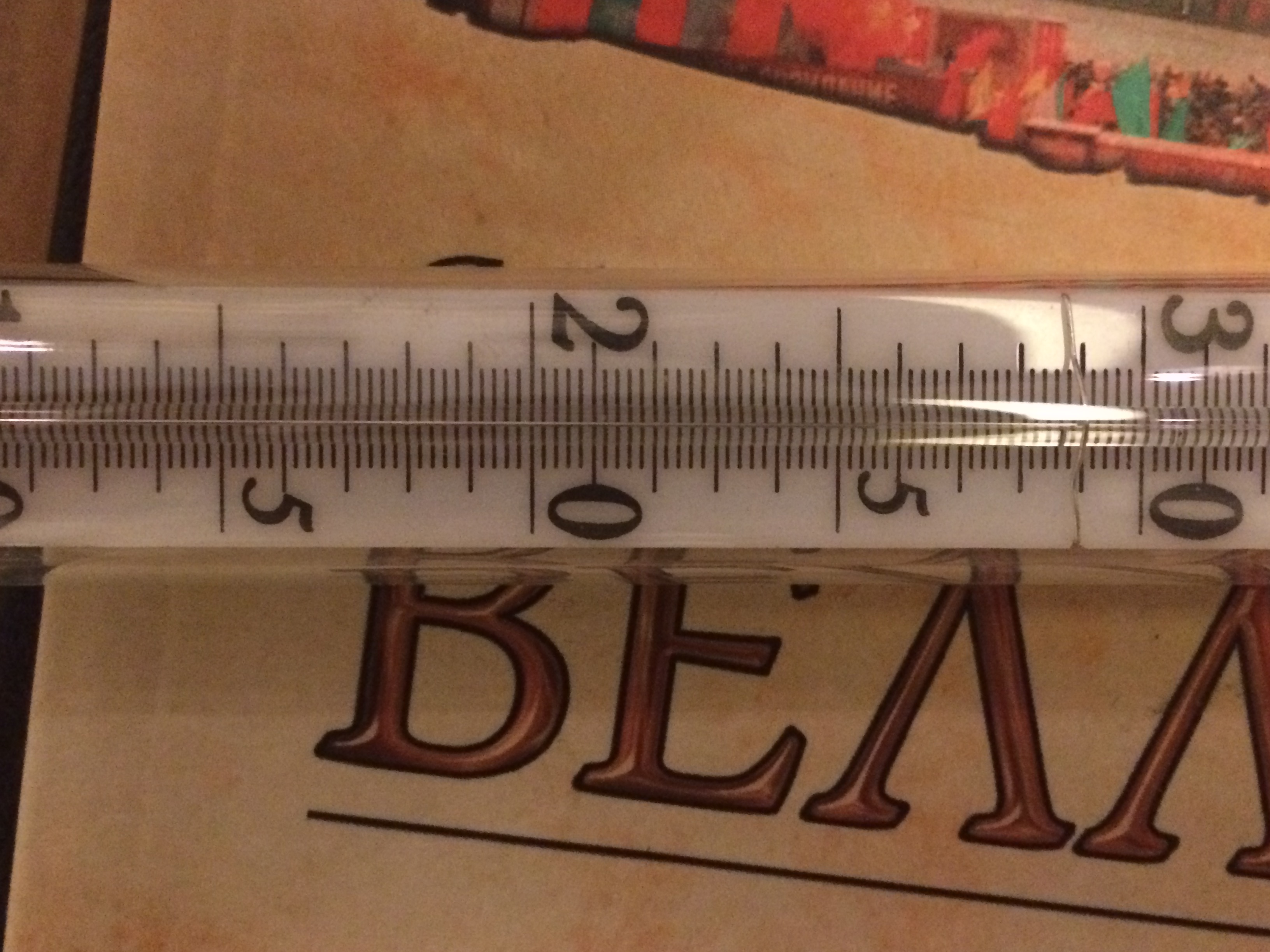
В качестве идеального термометра мы использовали лабораторный ртутный термометр, с ценой деления 0.2 градуса Цельсия:
Спутник с подключенными термодатчиками, а также ртутный термометр были помещены в «термокамеру», туда же поместили вентилятор для усиления конвекции:

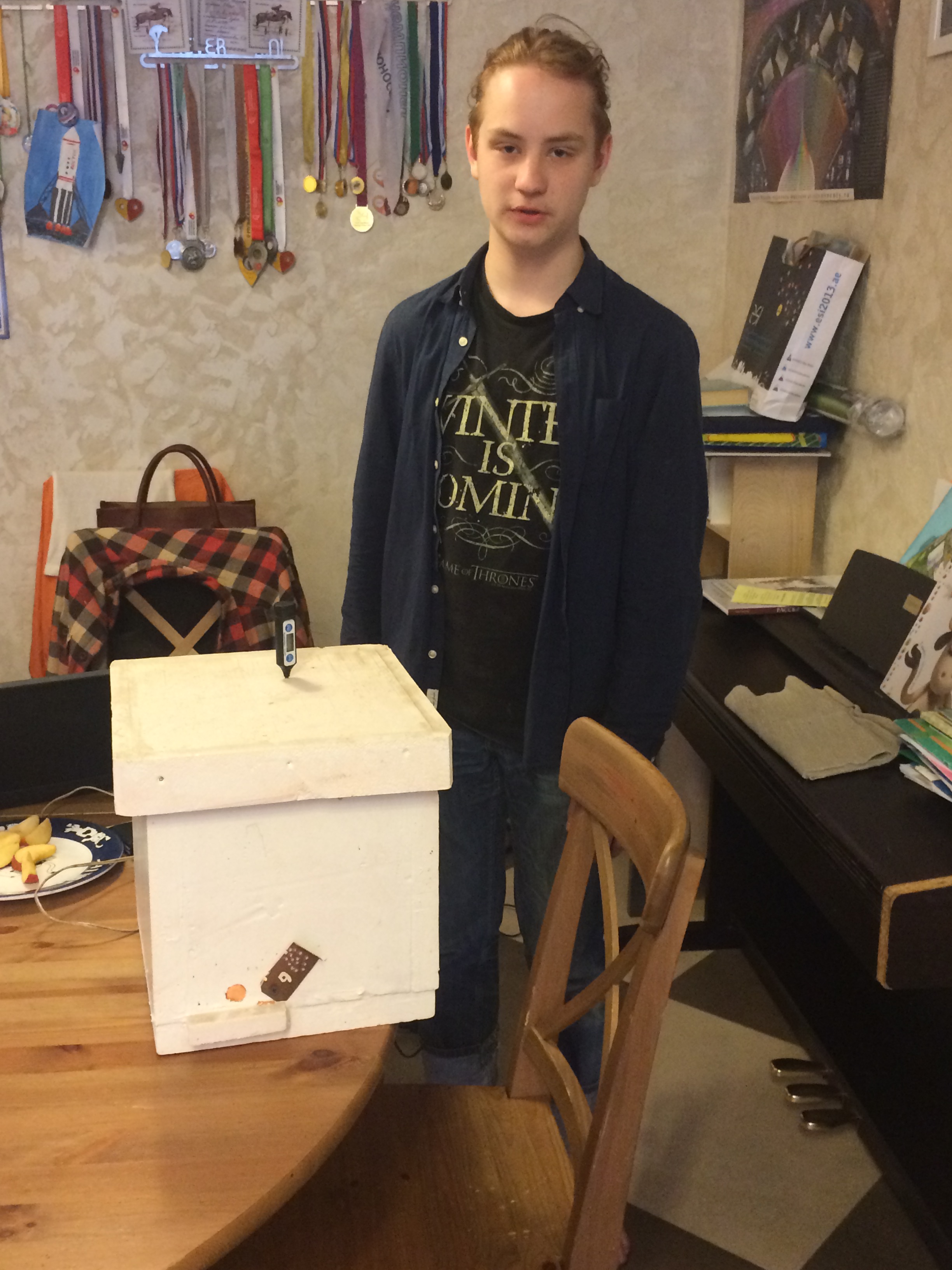


Для понижения температуры в «термокамеру» поместили замороженные овощи. После того как температура опустилась ниже 16-ти градусов по Цельсию, овощи убрали, дождались стабилизации температуры. Затем начали постепенное нагревание с помощью лампы накаливания, яркость которой регулируется реостатом.
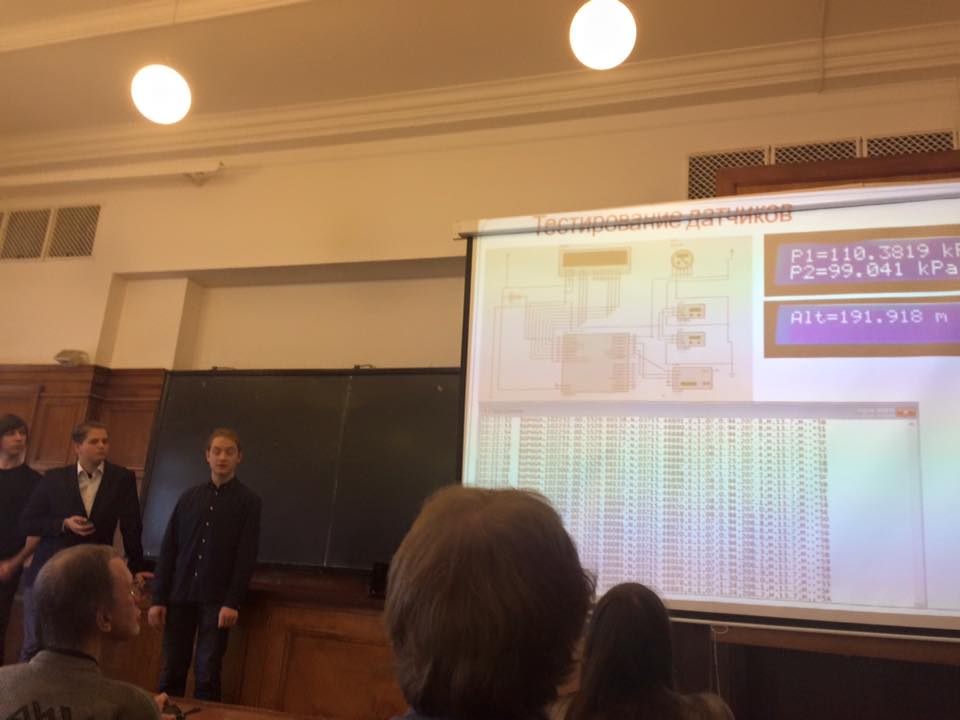
Спутник передавал данные по радиоканалу, прием велся на компьютере через терминал. Данные с ртутного термометра снимали вручную. Результаты измерений:
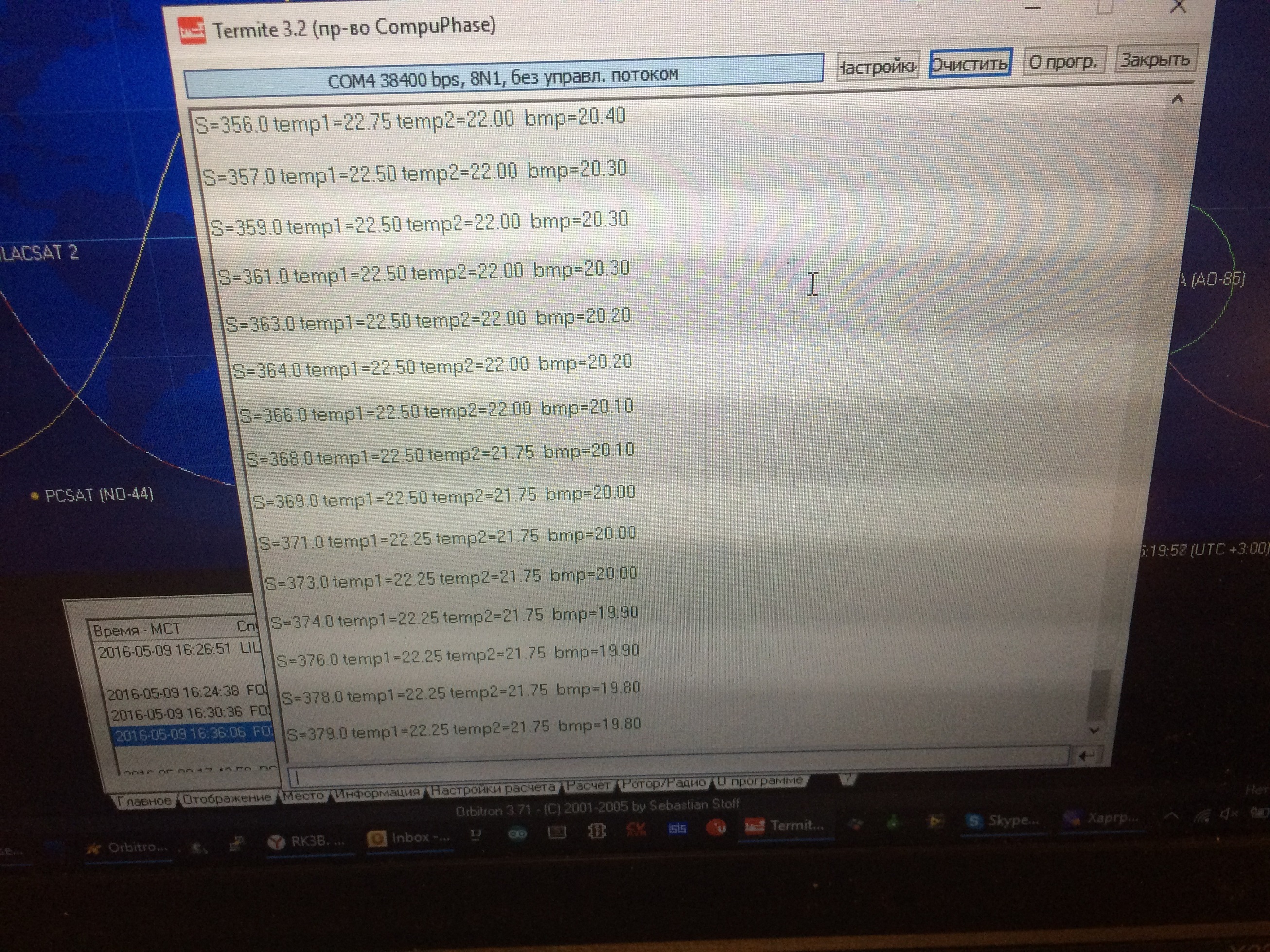
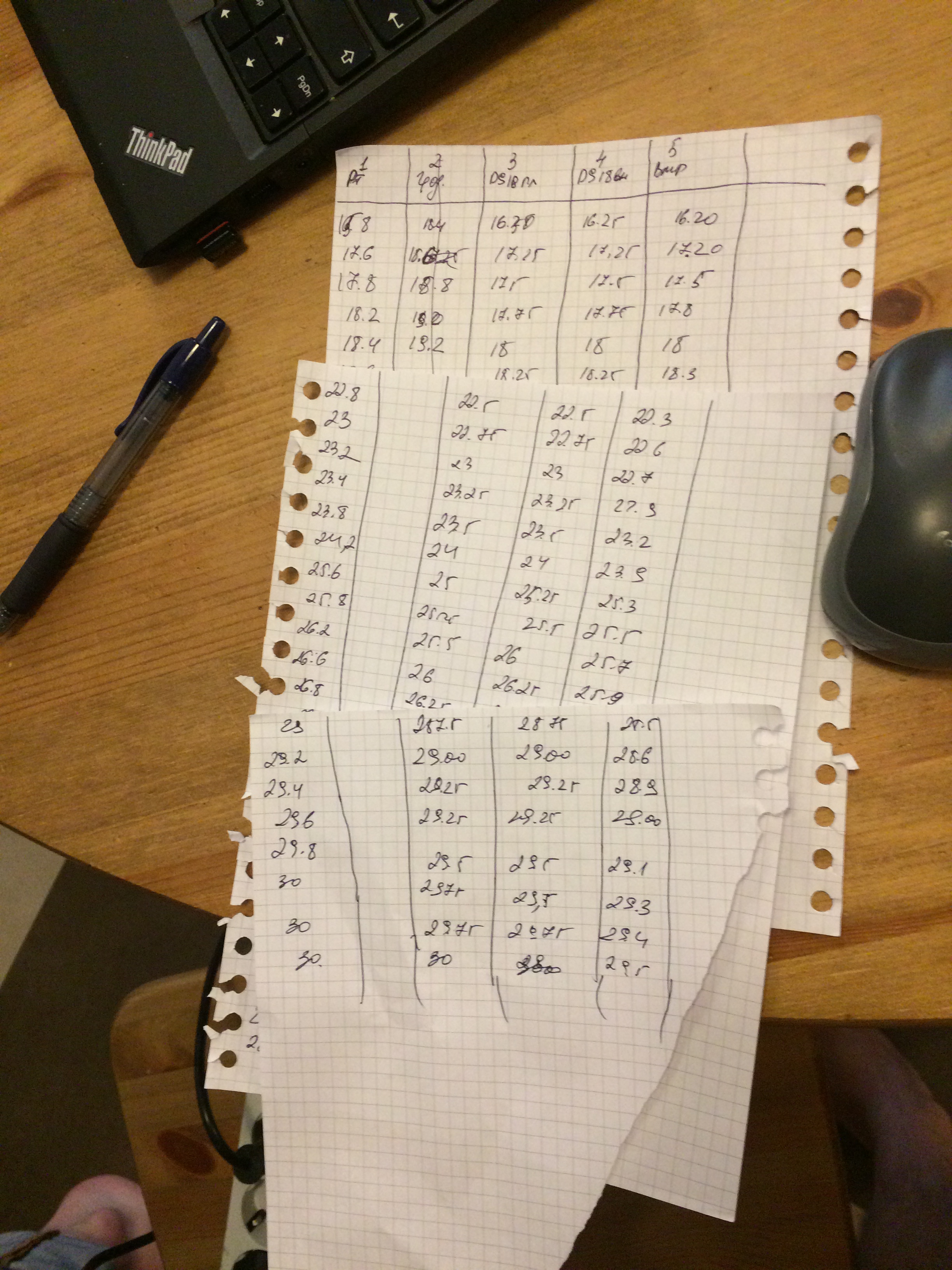
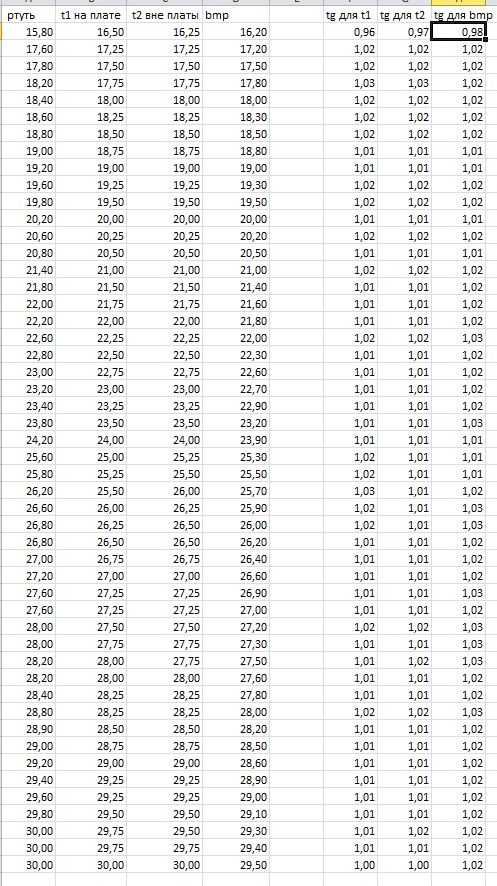
Как видно, разница в измерения небольшая есть, причиной ее может быть как разная инерционность датчиков, так и равномерное нагревание/охлаждение термокамеры. Для целей нашего эксперимента, вводить какие-то дополнительные поправки в измерения не нужно.
Зов вселенной 2016
19 марта этого года наша команда ТОК (Арсений, Илья и Михаил) приняла участие в конференции Зов Вселенной, которая проходила у нас в Троицке в гимназии им. Н. В. Пушкова. Наш доклад был в секции «Техника и Космос» и «Моделирование». Представляли текущее состояние спутника по проекту CanSat.
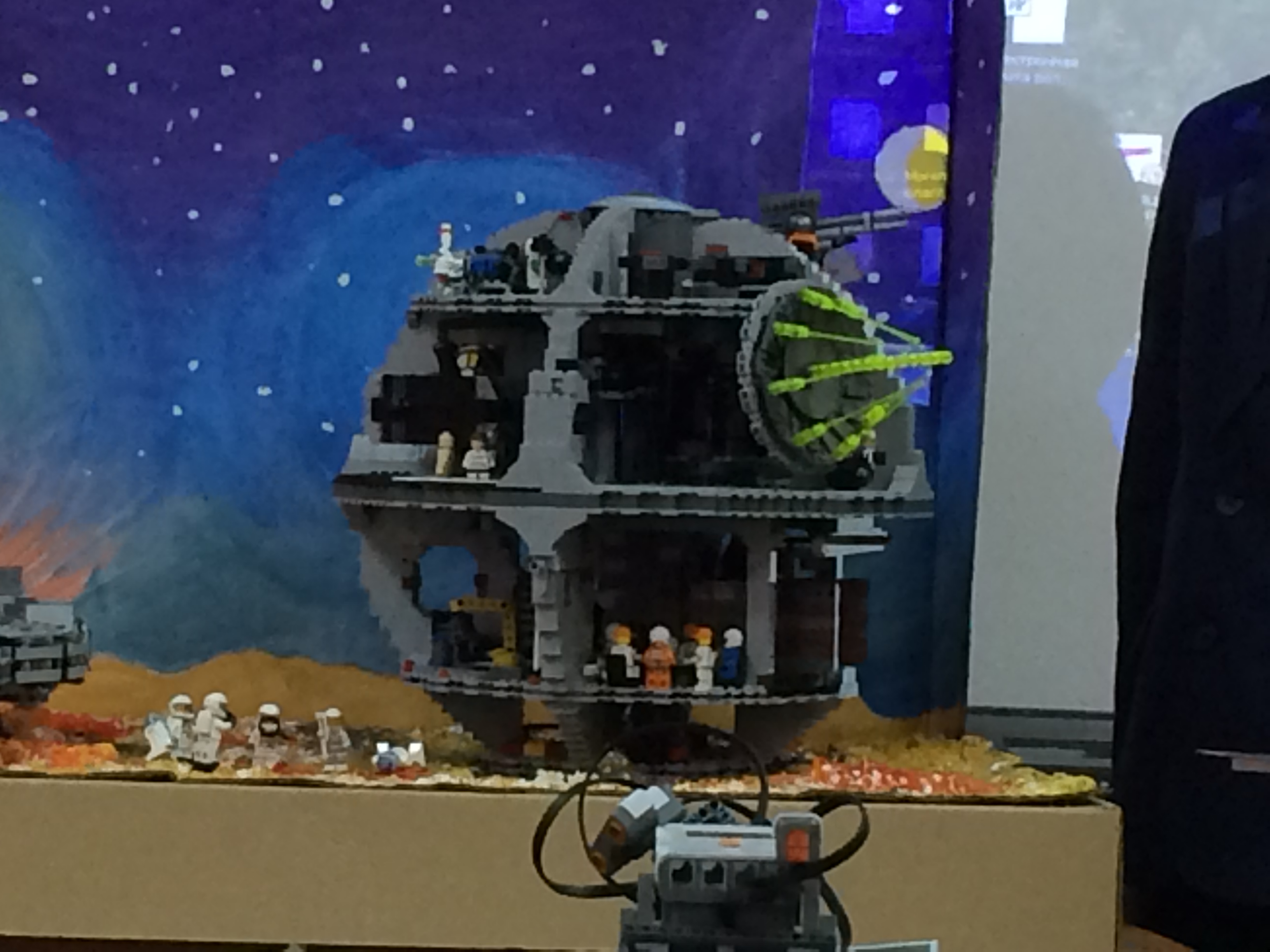
Из наиболее интересных на секции был проект двух шестиклассников, которые представили свой проект марсианской станции, который они собрали из лего.




Наша команда тоже не подкачала. Подготовились к выступлению очень хорошо. Четко и доступно доложили суть работы, ответили на все вопросы экспертов и зрителей. Арсений жёг глаголом сердца вопрошавшего Ареопага.


Ну и результат:

Роборука
В эти выходные делали с Фёдором руку киборга из картона.
Проект с сайта simplerobot.org:
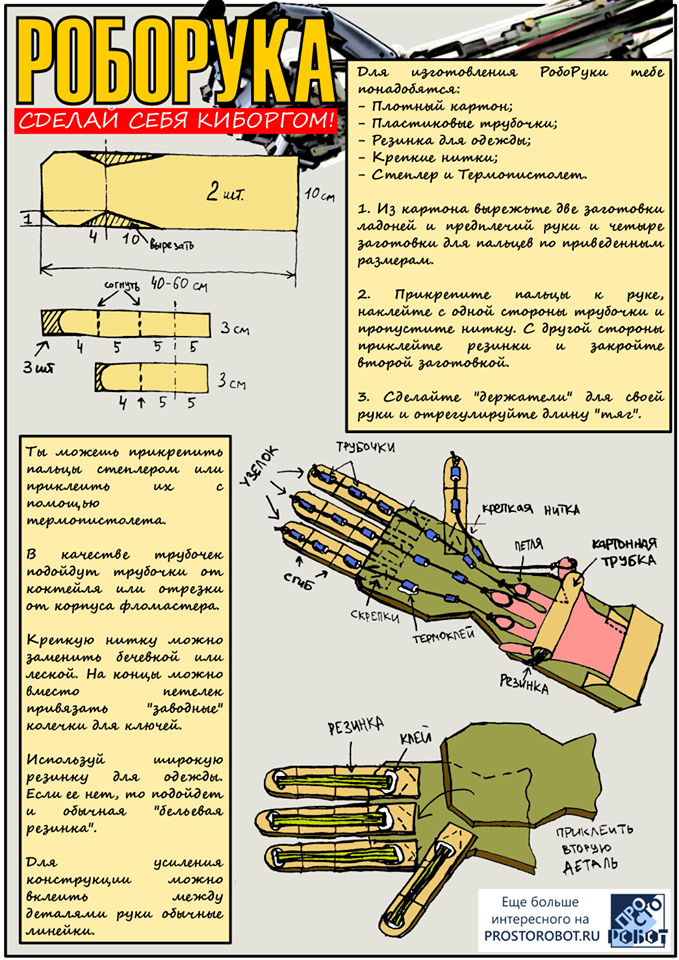
Игрушка достаточно простая в исполнении, но выглядит очень интересно и необычно.
Фёдор был в восторге. Я ещё раз убедился, что самая лучшая для ребенка игрушка — та, которую он сделал своими (или почти своими) руками.




Небольшой видеобозор:
Ground Station for CanSat
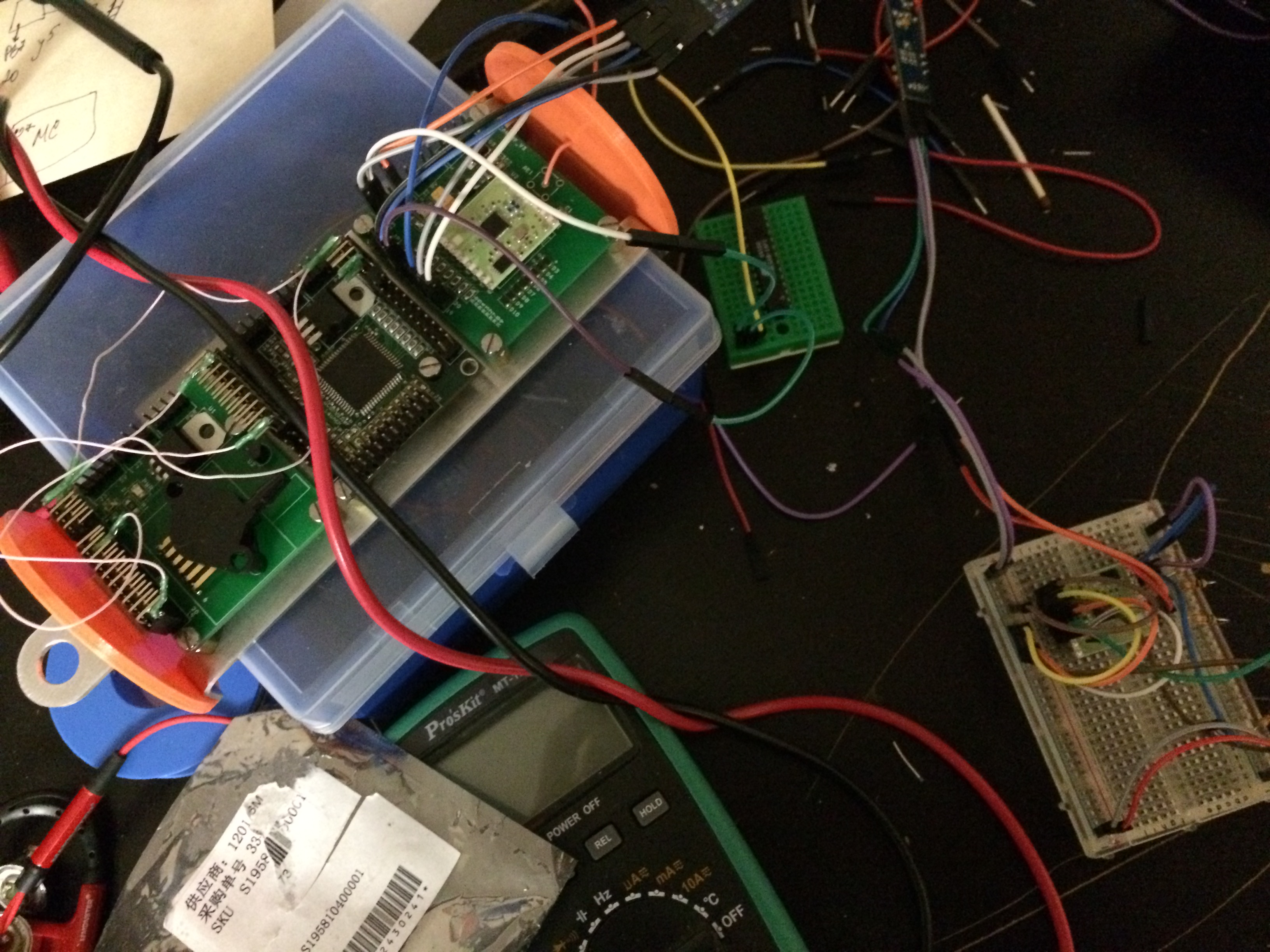
Приступили к сборке наземной приёмной станции (ground station). В основе радиомодуль RXQ2.
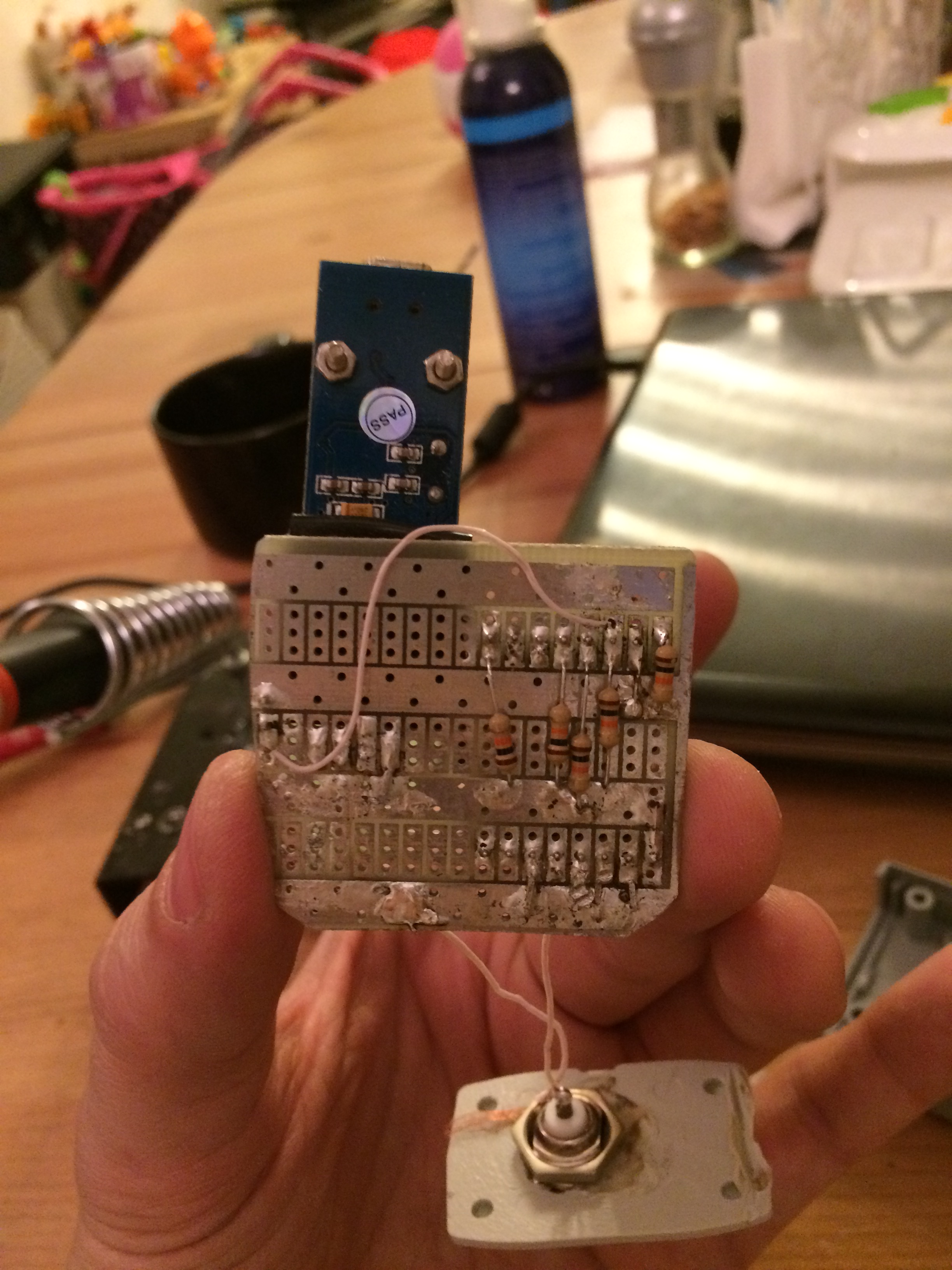
На этой фотографии модуль разведен на беспаячной макетной плате:
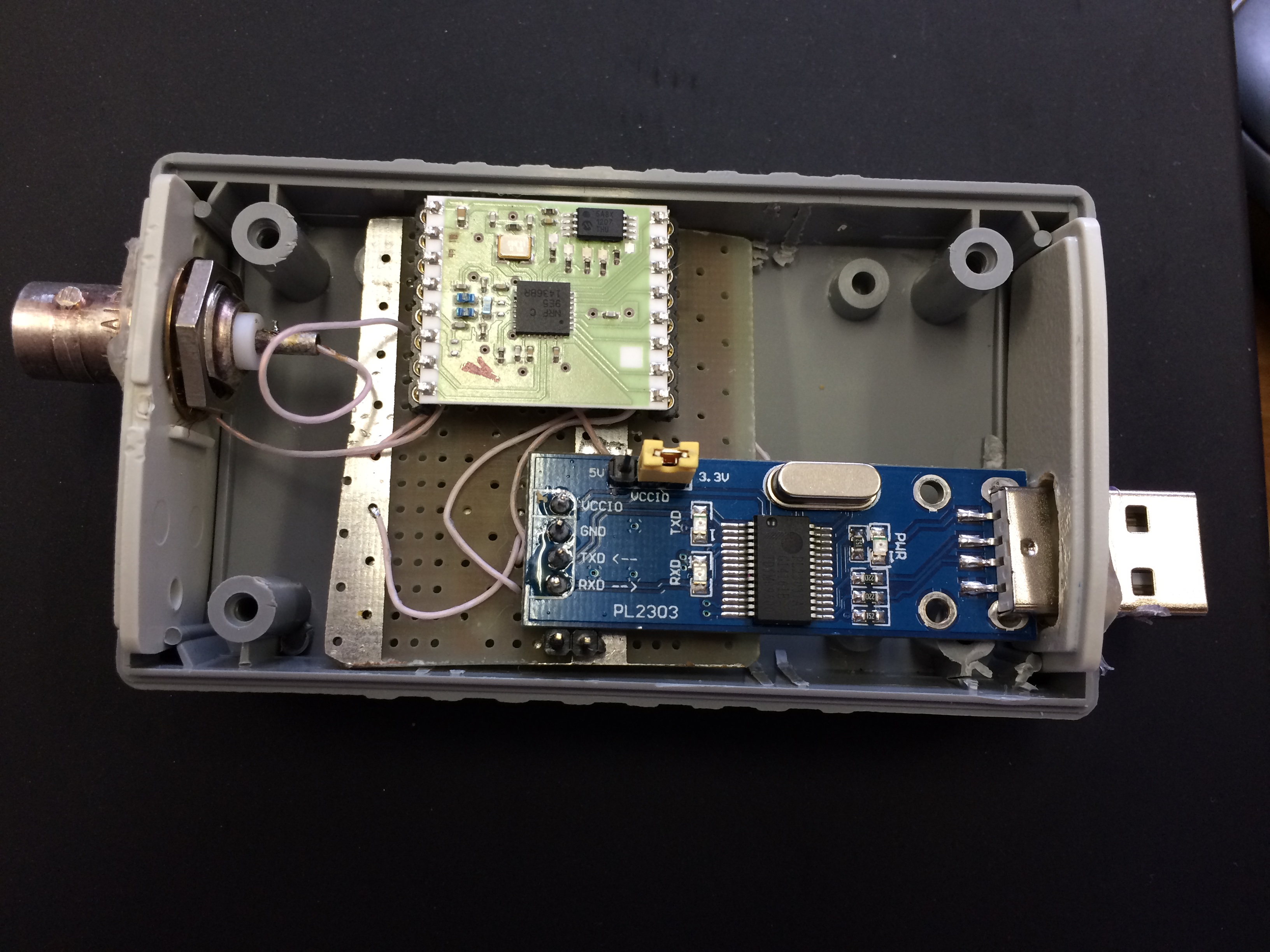
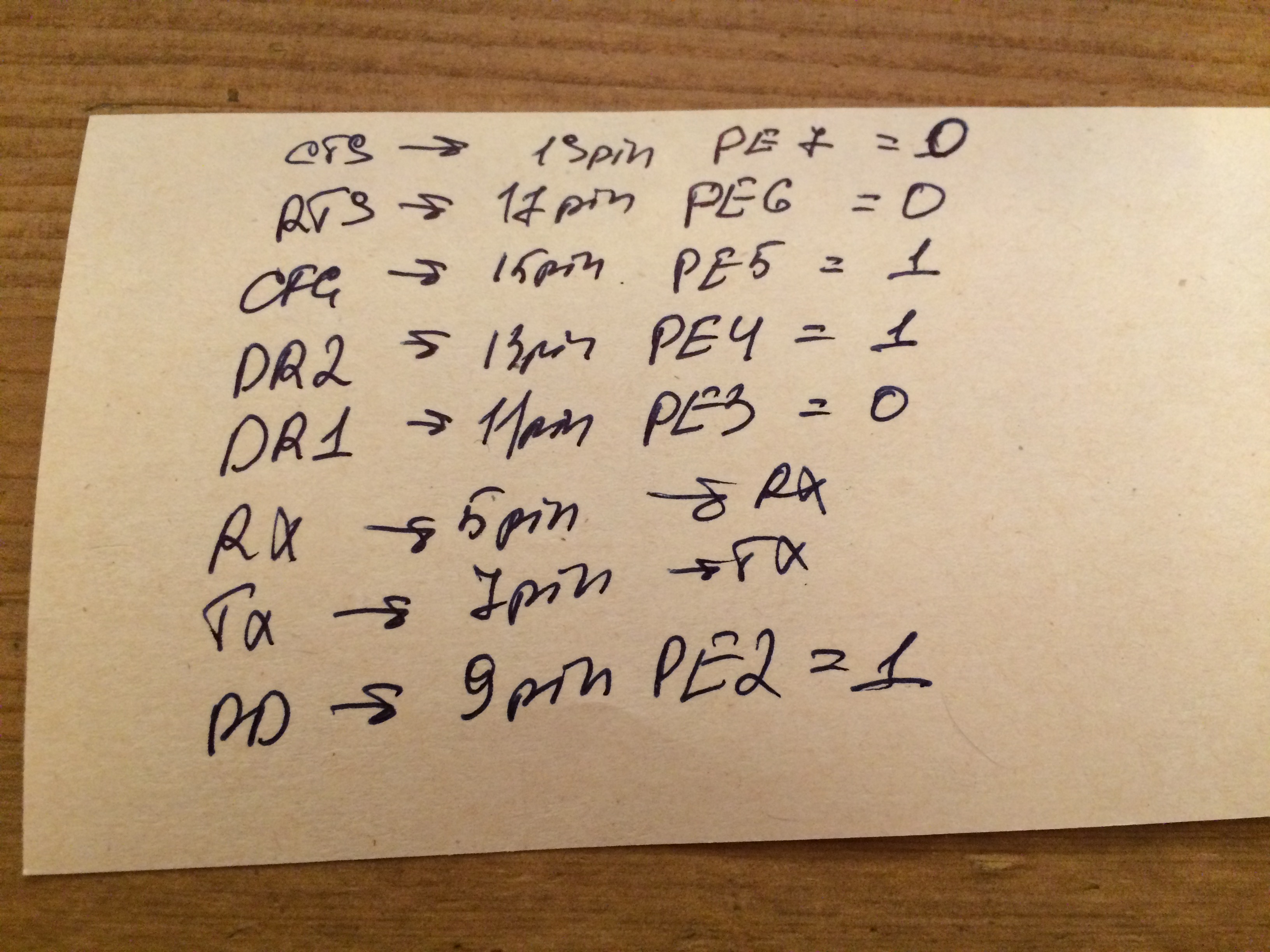
Финальный вариант устройства собрали на макетной плате для пайки, распаяли сам модуль и USB2UART переходник. Все паял лично Арсений. Скорость работы UART развели жестко 38600, добавили джампер на конфигурационный пин.
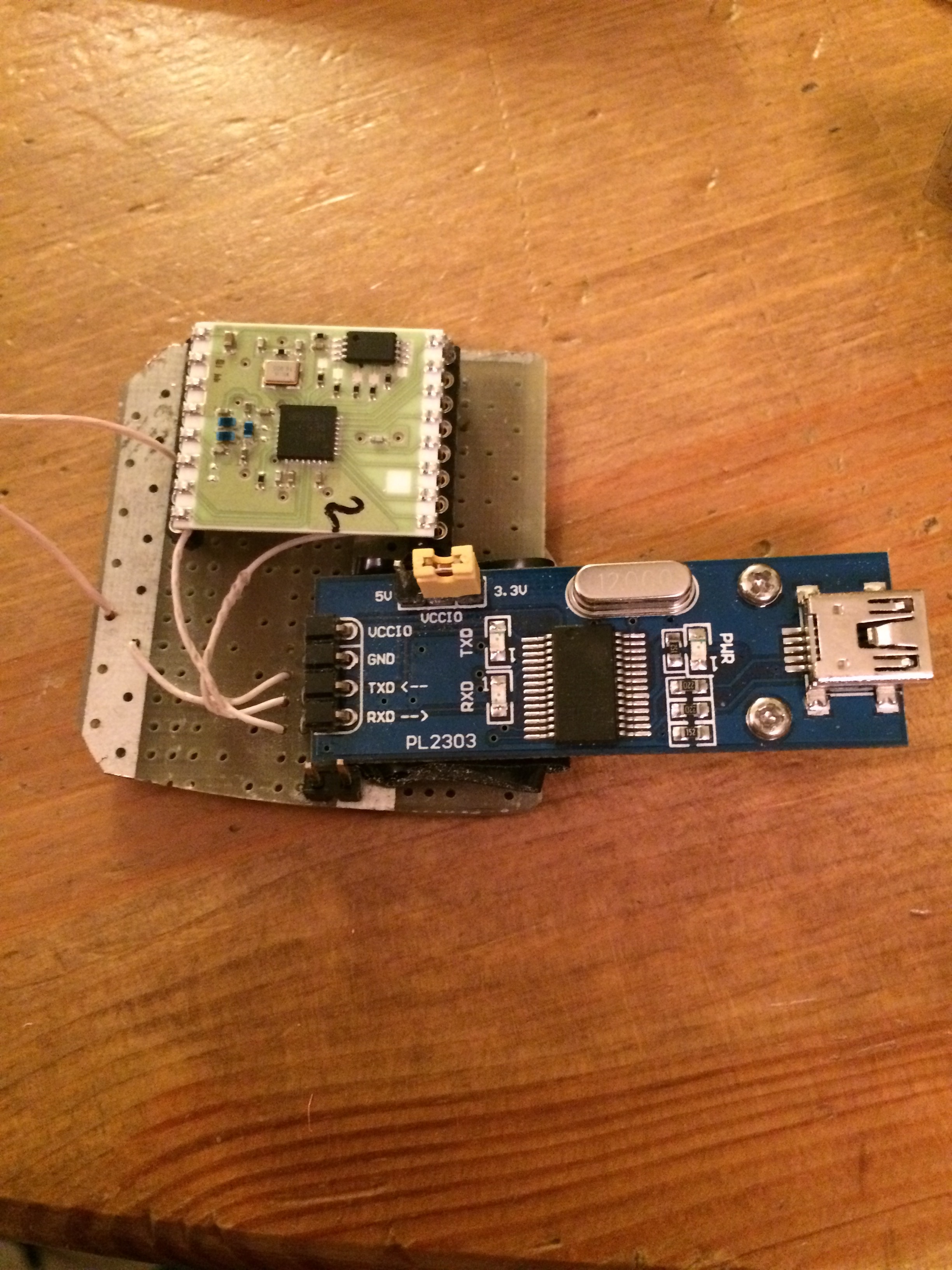
Готовое устройство поместили к красивую коробочку и перевязали бантиком. С одной стороны выход USB, с другой — BNC.
Подключили к «модной» антенне J-pole диапазона 433МГц.


Сборка спутника
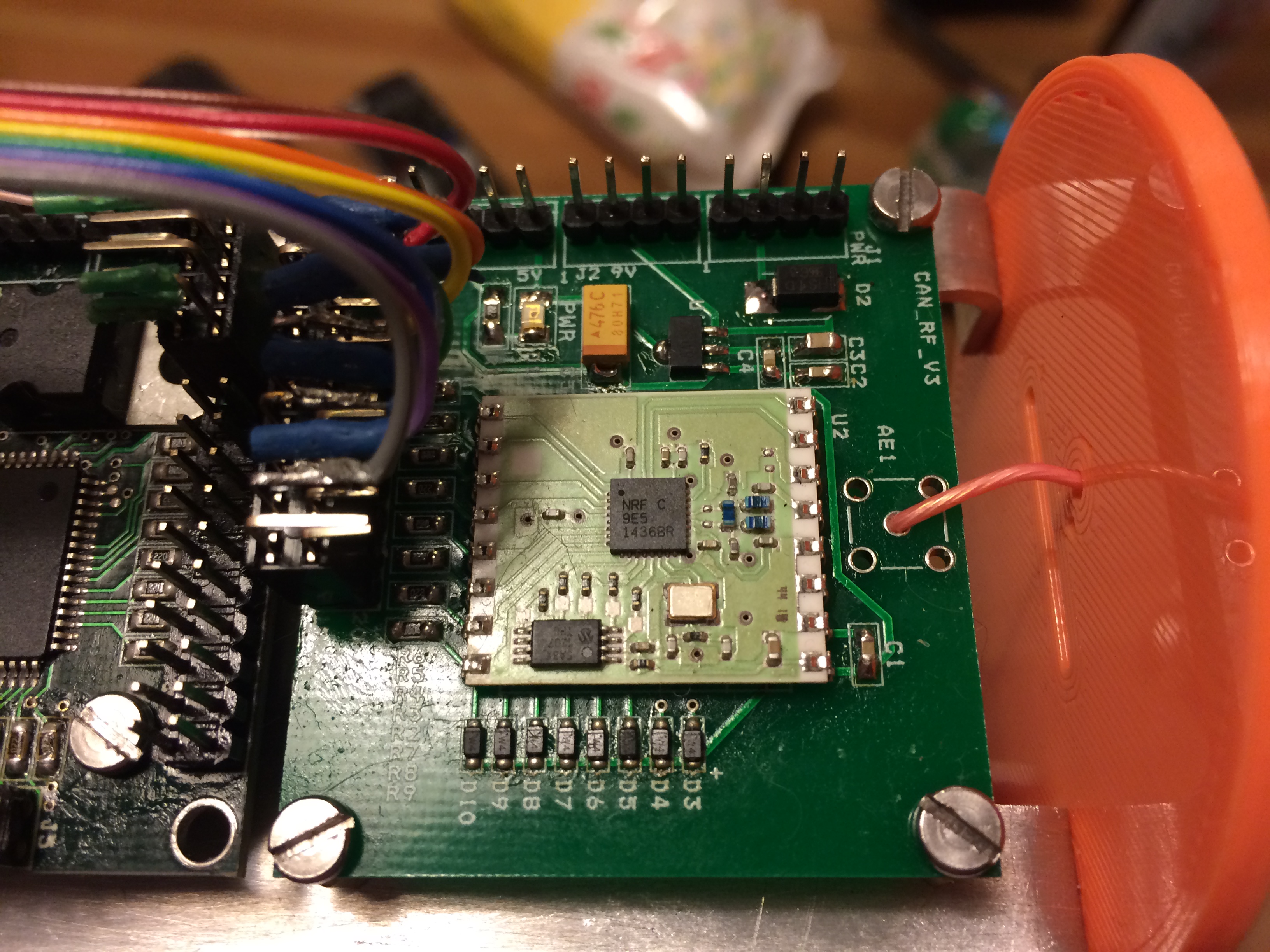
Начинаем собирать спутник уже на основе конструктора. Соединили плату с датчиками и плату с радиомодулем с управляющей платой микроконтроллера. Вроде все работает.


Зимняя юношеская космическая школа 2016
В это году как и в прошлом мы участвуем в отборочном туре чемпионата «Воздушно-инженерная школа (CanSat в России)».
В прошлом году отборочный тур мы прошли, но к запускам аппарат приготовить не смогли, слишком высокую планку решили взять — аппарат оказался сложным в реализации (делали научную нагрузку на коптер для поиска очагов возгорания). В этот раз мы участвуем в регулярном чемпионате CanSat (положение чемпионата).
Все мероприятия проходили в МГУ (на физическом факультете и НИИЯФ).
Открытие и некоторые лекции проходили в Большой физической аудитории имени академика Р. В. Хохлова.
Наша команда:

В этой же аудитории состоялись открытые защиты трех команд:
Все остальные защиты проходили в закрытом режиме по предварительной жеребьёвке.
На фото начало процедуры жеребьевки, Николай Николаевич Веденькин кладёт номерки в вязаную шапочку, которую держит Сергей Александрович Пикуз.

По результатам жеребьевки наша команда защищалась первой. Защита была уже на следующий день с утра:



Вечером того же дня на нашей базе мы устроили ночь кодинга:
На следующий день были лекции, практические занятия и мастер класс по пайке в Лаборатории Аэрокосмической Инженерии МГУ.

Закрытие и подведение итогов было в музее РКК Энергия в городе Королев. Экскурсию по музею завода №88 для нас провел Вахтанг Дмитриевич Вачнадзе:



Ну и результаты этого этапа для нашей команды оказались очень хорошими:


Работаем дальше.
Тестирование GPS модуля.
Сегодня тестировали работу GPS модуля ( Ublox neo 6M ). Он будет использован для определения местоположения спутника после его приземления. Координаты будут передаваться при помощи GSM модуля.
Вот так выглядит сам GPS приемник:
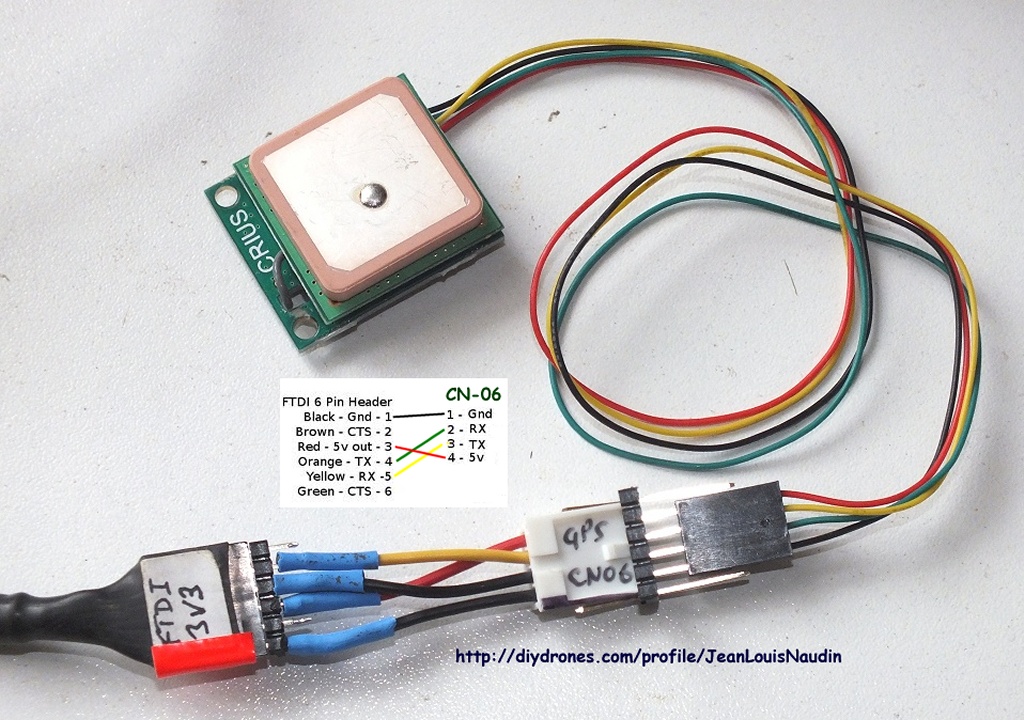

Питается модуль от 3,3 В, логические уровни у него тоже 3,3В. На плате, которую мы купили смонтирован сам модуль, память для сохранения настроек, стабилизатор питания и конвертер логических уровней. Т. о. плату можно подключить непосредственно к МК. Для тестов мы подключили модуль к компьютеру через USB2UART преобразователь.
С сайта производителя была скачана программа, которая отображает информацию, принимаемую с GPS приемника.
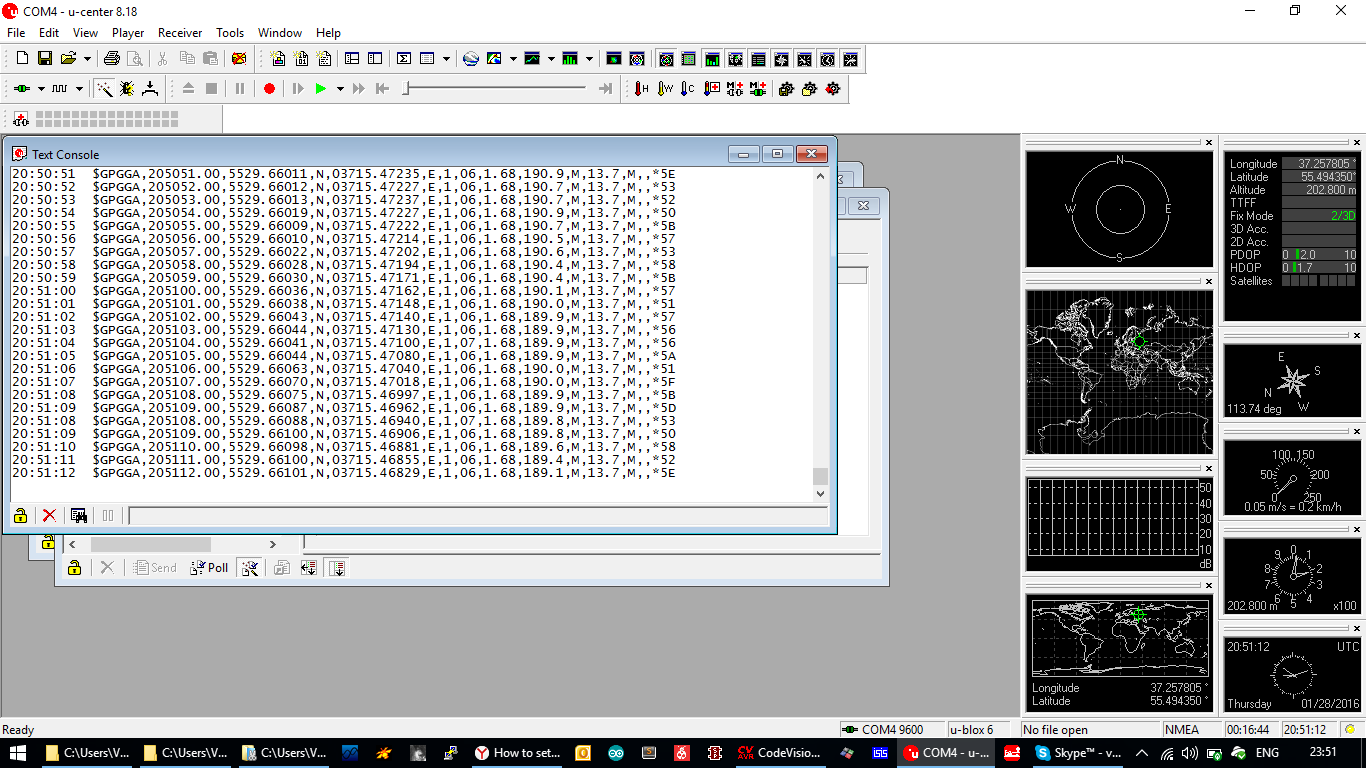
Информация с модуля передается в виде строк по протоколу NMEA:

Вся информация нам не нужна, достаточно только строки GPGGA
GGA — GPS Данные о местоположении
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
$GPGGA, hhmmss.ss, 1111.11, a, yyyyy.yy, a, x, xx, x.x, xxx, M, x.x, M, x.x, xxxx*hh
- Гринвичское время на момент определения местоположения.
- Географическая широта местоположения.
- Север/Юг (N/S).
- Географическая долгота местоположения.
- Запад/Восток (E/W).
- Индикатор качества GPS сигнала:
0 = Определение местоположения не возможно или не верно;
1 = GPS режим обычной точности, возможно определение местоположения;
2 = Дифференциальный GPS режим, точность обычная, возможно определение местоположения;
3 = GPS режим прецизионной точности, возможно определение местоположения. - Количество используемых спутников (00-12, может отличаться от числа видимых).
- Фактор Ухудшения Точности Плановых Координат (HDOP).
- Высота антенны приёмника над/ниже уровня моря.
- Единица измерения высоты расположения антенны, метры.
- Геоидальное различие — различие между земным эллипсоидом WGS-84 и уровнем моря(геоидом), ”-” = уровень моря ниже эллипсоида.
- Единица измерения различия, метры.
- Возраст Дифференциальных данных GPS — Время в секундах с момента последнего SC104 типа 1 или 9 обновления, заполнено нулями, если дифференциальный режим не используется.
- Индификатор станции, передающей дифференциальные поправки, ID, 0000-1023.
- Контрольная сумма строки.
Пример сообщения:
$GPGGA,004241.47,5532.8492,N,03729.0987,E,1,04,2.0 ,-0015,M,,,,*31
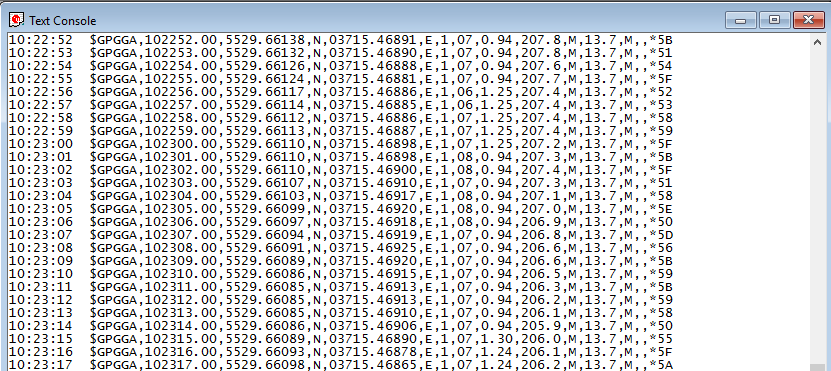
С помощью программы мы настроили, чтобы модуль выдавал только строки GPGGA.
Теперь необходимо подключить GPS модуль к микроконтроллеру и научиться принимать и обрабатывать информацию на нем.